






Center for Robotics Software News and Events
The Center for Robotics Software works to fulfill its mission to provide knowledge sharing and education to the public through a series of events, seminars, and training opportunities.
Reaching for the moon: UHCL robotics team's journey in the 2025 NASA Lunabotics Challenge
June 17, 2025

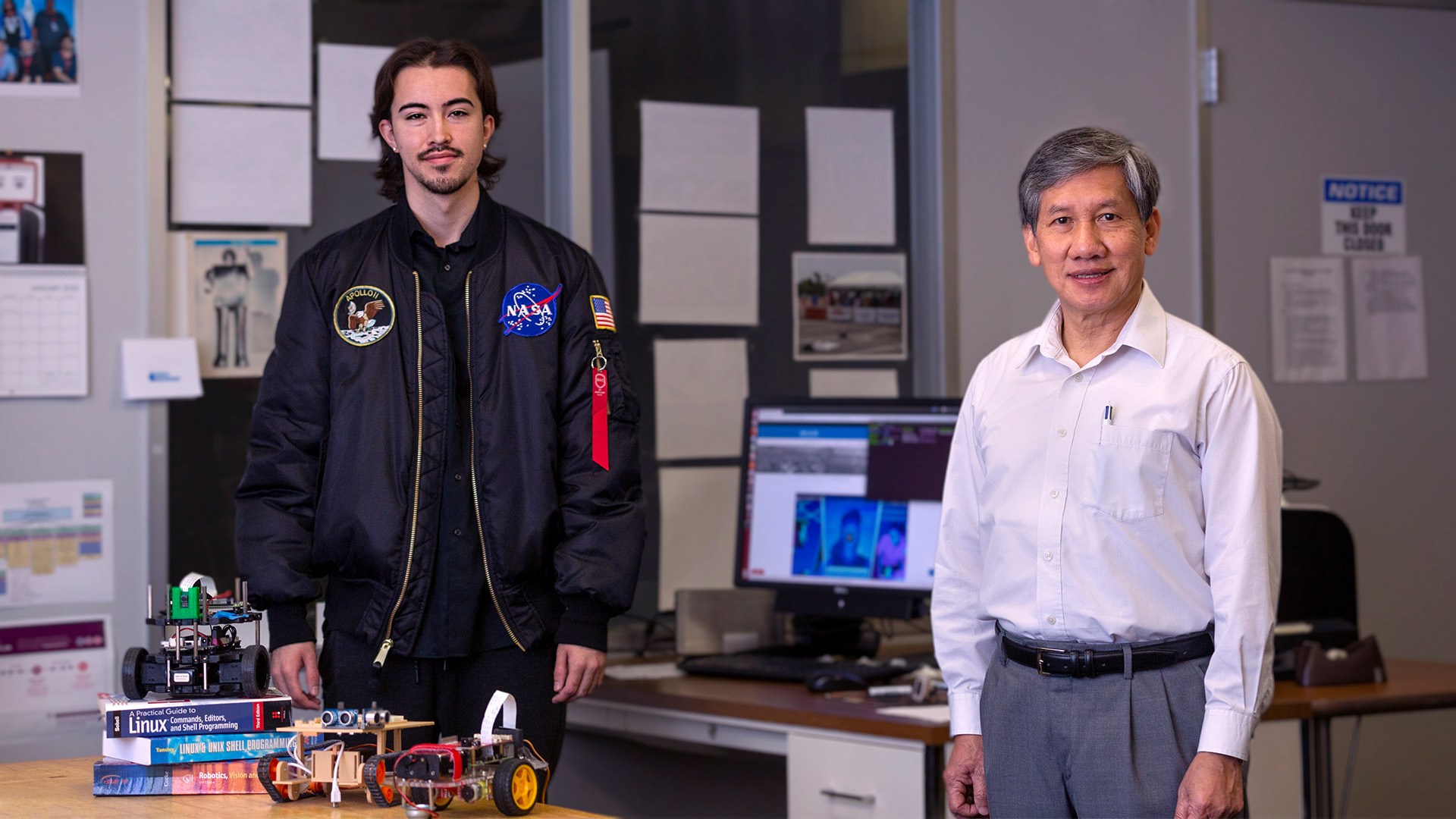
In the spring of 2025, a determined team of engineering students from the University of Houston-Clear Lake (UHCL) embarked on a bold and challenging mission: to design, build, and operate a fully autonomous lunar excavator as part of NASA’s annual Lunabotics Challenge.
Guided by faculty adviser Dr. Luong Nguyen, the team — composed of Fernando Hermosillo Leon, Cruz Reyna, Stephanie Bonilla, Brandon Rodriguez, Jose Reyes, and Javier Rivera — took on one of the most rigorous student robotics competitions in the nation.
Although it was UHCL’s first-ever entry into Lunabotics, the team demonstrated strong technical capabilities, innovative thinking, and an unwavering commitment to learning. Their efforts earned them a place in Event 2 of the competition, the Lunabotics Qualification Challenge held at the University of Central Florida (UCF), placing them among the top 35 teams selected from over 60 institutions nationwide.
Learn more about the UHCL robotics team's journey in the 2025 NASA Lunabotics Challenge.
UHCL's Robotics Team eyes $1 million prize in NASA competition
March 1, 2021
 Space Center Houston and NASA have announced that University of Houston-Clear Lake
is among the 22 international robotics teams qualifying for Phase 2 of the NASA Space
Robotics Challenge. This allows the team to advance to the final competition, which
has a prize purse of $1 million.
Space Center Houston and NASA have announced that University of Houston-Clear Lake
is among the 22 international robotics teams qualifying for Phase 2 of the NASA Space
Robotics Challenge. This allows the team to advance to the final competition, which
has a prize purse of $1 million.
The international competition focuses on developing fully autonomous robotic system operations, navigation and decision-making capabilities that will be tested on robotic systems within a simulated lunar environment.
Learn more about UHCL's Robotics Team in 2021 NASA competition.
International Robotics Symposium
September 19-21, 2019
The International Measurement Confederation (IMEKO) Technical Committee 17 brought the International Symposium on Measurement and Control in Robotics to University of Houston-Clear Lake on September 19-21.
Despite a rained-out reception and campus closure due to flooding from Tropical Storm Imelda, scientists and engineers from around the world met in the Bayou Building to discuss research, applications, trends and innovations in robotics, telerobotics, simulator platforms and mobile work machines, as well as virtual reality/augmented reality and 3-D modeling and simulation.
Because the storm had closed Houston's airports, a few attendees were not able to make the conference to present their papers. Organizers adjusted accordingly.

Susumu Tachi, professor emeritus of The University of Tokyo and pioneer in human-controlled
robotics and humanoid robots, presented his vision of "telexistence," a future where employees
could work in virtual reality from anywhere to control robots that perform real-time
tasks, such as manufacturing. "There would be no need for immigration," he told attendees
in his Sept. 20 keynote address.
IMEKO TC 17 is comprised of members of a 17-nation confederation, which is calling out to engineers and researchers worldwide to contribute to the symposium's workshops and panels. The Institute of Electrical and Electronics Engineers (IEEE) is sponsored the event. All papers were peer reviewed and will be published with IMEKO and IEEE guidelines.
For more information visit the International Symposium on Measurement and Control in Robotics website at ISMCR.org.
Houston Robotics and AI Day 2018
August 3, 2018
 The third annual Houston Robotics and AI Day took place on Friday, August 3 in the
UHCL Bayou building with over 50 people in attendance. Dr. Reg Berka of Houston Mechatronics
kicked off the event with a keynote speech highlighting the breakthrough technology
currently in development for Aquanaut, the underwater autonomous transforming robot.
The morning continued with presentations from Houston-area robotics and AI students
and faculty. A poster session followed with additional students highlighting and
discussing the work in which they are currently involved.
The third annual Houston Robotics and AI Day took place on Friday, August 3 in the
UHCL Bayou building with over 50 people in attendance. Dr. Reg Berka of Houston Mechatronics
kicked off the event with a keynote speech highlighting the breakthrough technology
currently in development for Aquanaut, the underwater autonomous transforming robot.
The morning continued with presentations from Houston-area robotics and AI students
and faculty. A poster session followed with additional students highlighting and
discussing the work in which they are currently involved.
This annual event provides a showcase of the current projects and research being done at Houston-area academic institutions including UHCL, the main and downtown campuses of the University of Houston, San Jacinto College, and Rice University. Anyone interested in robotics and AI is encouraged to attend.
NASA Swarmathon Competition
April 17-19, 2018
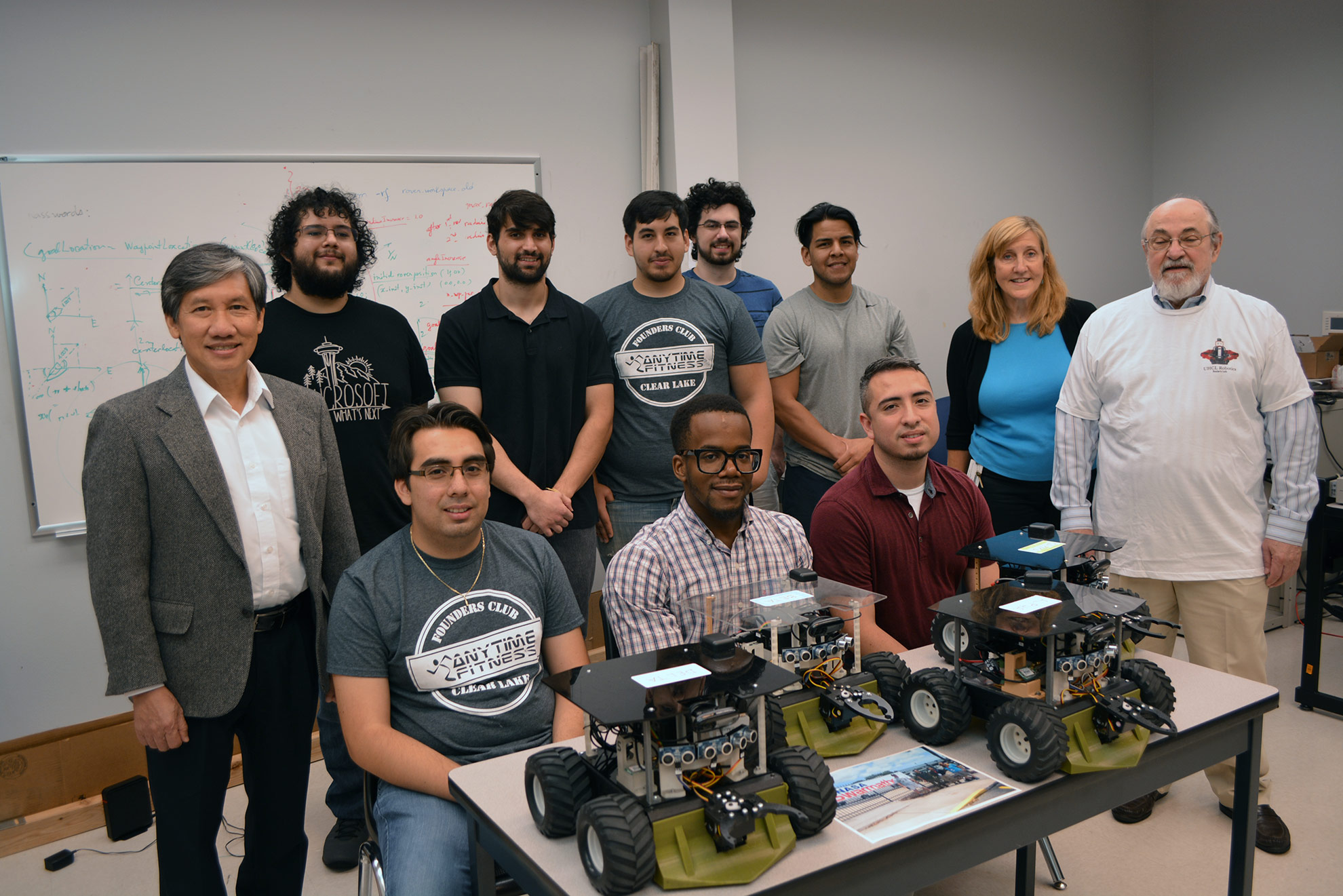
 A combined team from UHCL and San Jacinto College returned from the NASA Swarmathon
competition at Kennedy Space Center with the second place award for the Mission to
Mars competition. The NASA Swarmathon is a multi-year competition with the challenge
to develop cooperative robots for Mars exploration and resource gathering. For the
physical robot competition, the UHCL-SJC team competed with 23 other Minority Serving
Universities and Community Colleges to determine the optimum search algorithms for
these robotic swarms. Pictured are the students and faculty from both schools as
they receive the award from the NASA/University of New Mexico staff at the competition
at KSC.
A combined team from UHCL and San Jacinto College returned from the NASA Swarmathon
competition at Kennedy Space Center with the second place award for the Mission to
Mars competition. The NASA Swarmathon is a multi-year competition with the challenge
to develop cooperative robots for Mars exploration and resource gathering. For the
physical robot competition, the UHCL-SJC team competed with 23 other Minority Serving
Universities and Community Colleges to determine the optimum search algorithms for
these robotic swarms. Pictured are the students and faculty from both schools as
they receive the award from the NASA/University of New Mexico staff at the competition
at KSC.
For more information on this competition and to see the final results, check out the NASA Swarmathon website.
Center for Robotics Software Robot Operating System
January-February, 2018
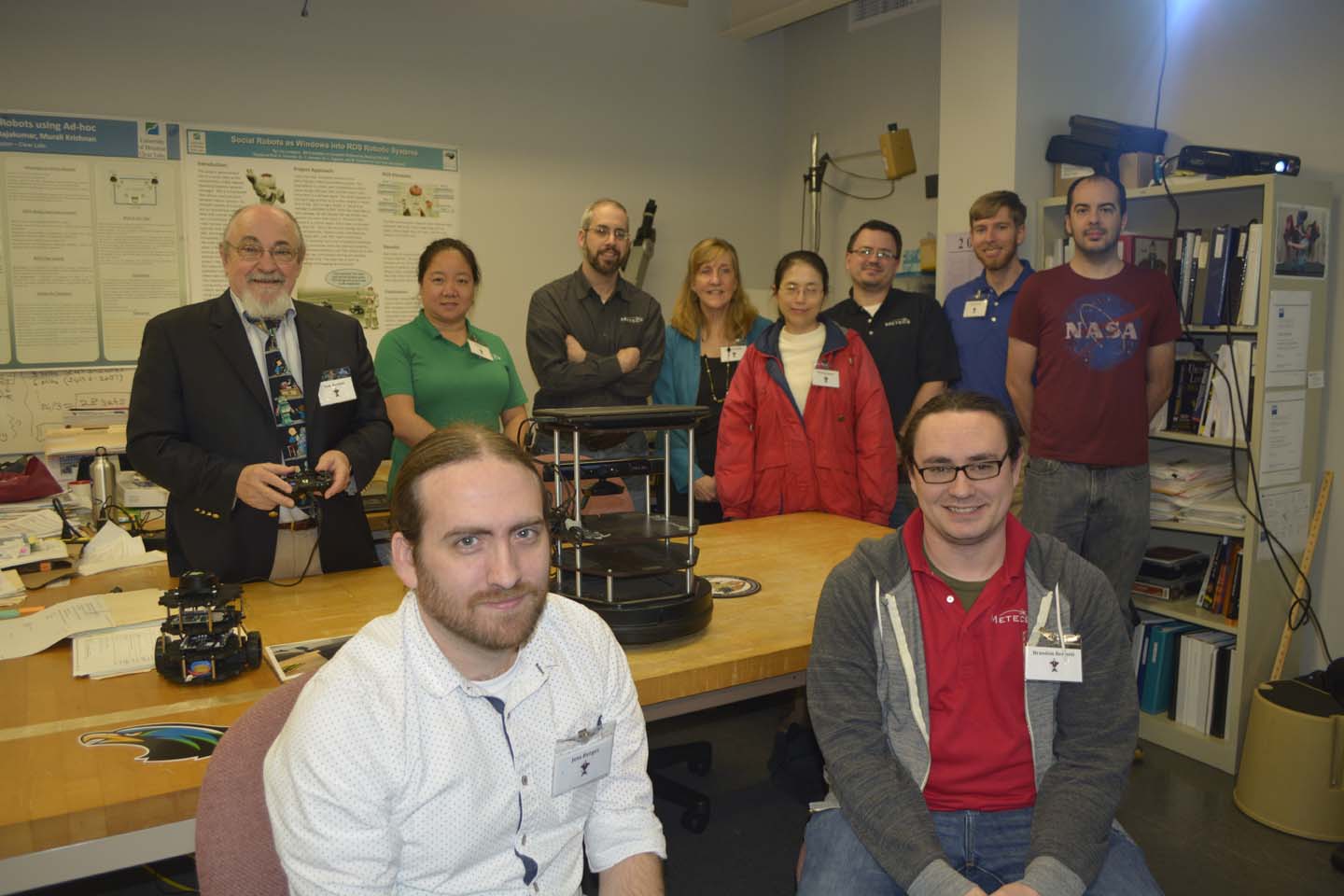
The Center for Robotics Software hosted a 3-day seminar for engineers and programmers from the local company METECS. The seminar taught the fundamentals of the Robot Operating System (ROS). Instructors, Dr. Thomas Harman, Dr. Luong Nguyen and Carol Fairchild provided lectures, hands-on simulation exercises and robot demonstrations to the group. The METECS employees were very interested and engaged. All felt that the ROS workshop was successful and additional seminars are anticipated.
UHCL Swarmathon Team Pushing Robotics to New Frontiers
UH-Clear Lake Hosts Center for Robotic Software with Kickoff Event

Houston Robotics and AI Day showcases area research, technology
July 21, 2017
Area educators, engineers and students gathered at University of Houston-Clear Lake for the Houston Robotics and AI Day on Friday, July 21 for presentations and demonstrations of the latest research and applications of robotics and artificial-intelligence technology.
Robotics and AI Day provides a showcase of what is, what can be

August 14, 2017
Three wide-eyed middle-school students stood over Turtlebot 3 "Burger," one of the latest robots procured by University of Houston-Clear Lake's Center for Robotics Software. Under eight inches tall, it doesn't look much like a robot. It doesn't look anything at all like a turtle, let alone a hamburger.